
What is a Servo Motor?
A servo motor is an electrical device that can push or rotate an object with great precision. If you want to rotate an object at some specific angles or distance, then you use a servo motor. It is just made up of a simple motor that runs through a servo mechanism. If the motor is used is DC powered then it is called DC servo motor, and if it is AC powered motor then it is called AC servo motor. We can get a very high torque servo motor in small and lightweight packages. Due to these features, they are being used in many applications like toy cars, RC helicopters, and planes, Robotics, Machine, etc
Servo motors are rated in kg/cm (kilogram per centimeter) most hobby servo motors are rated at 3kg/cm or 6kg/cm or 12kg/cm. This kg/cm tells you how much weight your servo motor can lift at a particular distance. For example, A 6kg/cm Servo motor should be able to lift 6kg if the load is suspended 1cm away from the motor’s shaft, the greater the distance the lesser the weight carrying capacity.
The position of a servo motor is decided by electrical pulse and its circuitry is placed beside the motor.
For practical Applications using servo motor refer to the link below:
Servo Mechanism
It consists of three parts:
- Controlled device
- Output sensor
- Feedback system
It is a closed-loop system where it uses a positive feedback system to control the motion and final position of the shaft. Here the device is controlled by a feedback signal generated by comparing output signal and reference input signal.
Here reference input signal is compared to the reference output signal and the third signal is produced by a feedback system. And this third signal acts as an input signal to control the device. This signal is present as long as a feedback signal is generated or there is a difference between the reference input signal and the reference output signal. So the main task of servomechanism is to maintain the output of a system at the desired value in the presence of noises.
Working principle of Servo Motors
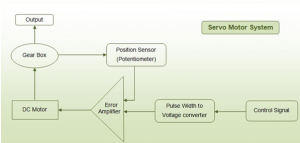
A servo consists of a Motor (DC or AC), a potentiometer, gear assembly, and a controlling circuit. First of all, we use gear assembly to reduce RPM and to increase the torque of the motor. Say at the initial position of the servo motor shaft, the position of the potentiometer knob is such that there is no electrical signal generated at the output port of the potentiometer. Now an electrical signal is given to another input terminal of the error detector amplifier.
Now the difference between these two signals, one comes from the potentiometer and another comes from other sources, will be processed in a feedback mechanism and output will be provided in terms of the error signal. This error signal acts as the input for the motor and the motor starts rotating. Now motor shaft is connected with a potentiometer and as the motor rotates so the potentiometer will generate a signal. So as the potentiometer’s angular position changes, its output feedback signal changes.
After some time the position of the potentiometer reaches a position that the output of the potentiometer is the same as the external signal provided. At this condition, there will be no output signal from the amplifier to the motor input as there is no difference between the externally applied signal and the signal generated at the potentiometer, and in this situation, the motor stops rotating.
Controlling Servo Motor:
Servo motors have three wires coming out of them. Out of which two will be used for Supply (positive and negative) and one will be used for the signal that is to be sent from the MCU.
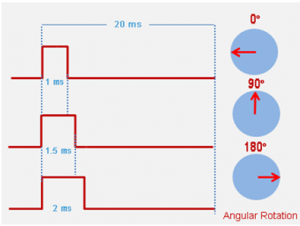
Servo motor is controlled by PWM (Pulse with Modulation) which is provided by the control wires. There is a minimum pulse, a maximum pulse, and a repetition rate. Servo motor can turn 90 degrees from either direction from its neutral position. The servo motor expects to see a pulse every 20 milliseconds (ms) and the length of the pulse will determine how far the motor turns. For example, a 1.5ms pulse will make the motor turn to the 90° position, such as if the pulse is shorter than 1.5ms shaft moves to 0°, and if it is longer than 1.5ms then it will turn the servo to 180°.
All servo motors work directly with your +5V supply rails but we have to be careful about the amount of current the motor would consume, if you are planning to use more than two servo motors a proper servo shield should be designed.
SG90 specifications:
You need torque to control the position of an object, for example, and this little box that weighs 0.32 oz (9.0 g) can provide at 4.8V a torque of 25.0 oz-in (1.80 kg-cm). At 4.8V, the speed of the servo is 0.12 sec/60°. All these specifications are really impressive for this little plastic box. Well, there are other high-end servos with a bit more muscle than the SG90 servo, but these high-end servos can’t beat the price of the SG90 servo. SG90 is cheap enough to throw away when they break. Inside the micro servo, you will find the pieces from the below image. The top cover hosts the plastic gears while the middle cover hosts a DC motor, a controller, and the potentiometer.
The SG90 micro servo can turn your robot wheel. And this is great since the shapes of the servo box help you attach it to a robot chassis. But there is a problem with the rotation of the SG90 servo. It’s about the rotation that reaches a maximum of 180 degrees
 Inside a Servo Motor
Inside a Servo Motor

 Advantages:
Advantages:
- If a heavy load is placed on the motor, the driver will increase the current to the motor coil as it attempts to rotate the motor. Basically, there is no out-of-step condition.
- High-speed operation is possible.
Disadvantages:
- Since the servomotor tries to rotate according to the command pulses but lags behind, it is not suitable for precision control of rotation.
- Higher cost.
- When stopped, the motor’s rotor continues to move back and forth one pulse, so that it is not suitable if you need to prevent vibration
7 Applications of Servo Motors
Servomotors are used in applications requiring rapid variations in speed without the motor getting overheated.
- In Industries they are used in machine tools, packaging, factory automation, material handling, printing converting, assembly lines, and many other demanding applications robotics, CNC machinery, or automated manufacturing.
- They are also used in radio-controlled airplanes to control the positioning and movement of elevators.
- They are used in robots because of their smooth switching on and off and accurate positioning.
- They are also used by the aerospace industry to maintain hydraulic fluid in their hydraulic systems.
- They are used in many radio-controlled toys.
- They are used in electronic devices such as DVDs or Blue-ray Disc players to extend or replay the disc trays.
- They are also being used in automobiles to maintain the speed of vehicles.









